


Matrix Роботизированный комплекс Манипулятор RB6231-2
|
|
|

Доставка по России и зарубеж

Гарантийное обслуживание

Монтаж и пусконаладка

Техподдержка и сопровождение

Сертификация и декларирование
? Задать вопрос по товару
Описание
Роботизированный комплекс Манипулятор - Matrix TSL представляет собой полностью функциональную руку с шестью степенями свободы, оснащенного сервоприводами и контроллерами управления. Манипулятор надежно крепится на основание и обеспечивает полную имитацию промышленного манипулятора в компактном исполнении.
Манипулятор в своей работе обеспечивает быстрое, точное перемещение и высокую повторяемость движений, комплект включает функциональный захват.
Комплекс управляется микроконтроллером E-blocks2 dsPIC с комбинированной доской, который включает 16 переключателей, 16 светодиодов, 4-строчный 20-символьный ЖК-дисплей и 7-сегментный дисплей. Также предусмотрена плата управления сервомотором, плата bluetooth, цветовой сенсор Grove I2C и плата Grove.
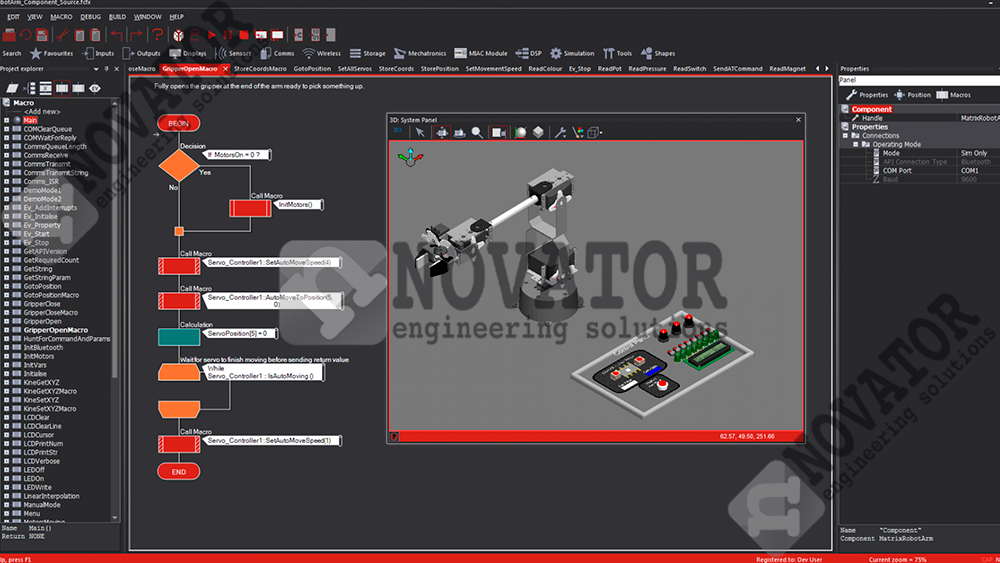
Плата может быть запрограммирована непосредственно из программного обеспечения Flowcode для dsPIC или MPLAB Microchip. Полная симуляция Flowcode поставляется в комплекте. Система управления поставляется с полным интерфейсом прикладных программ. Управлять роботом можно с помощью любого устройства с поддержкой Bluetooth, такого как ПК, Android или устройство Apple, используя ряд программных приложений.
Комплект поставляется готовым к применению, собранным. Методическое руководство, включает рабочие тетради и пошаговые инструкции для выполнения разнообразных заданий.
Цели обучения / эксперименты:
- Конструкция и программирование манипуляторов;
- Программирование микроконтроллеров;
- Датчики и приводы в робототехнике;
- Кинематика: 3D-движение в роботизированных системах;
- Управление через Интернет;
- Программирование сложных кинематических систем.
Рабочие упражнения включают:
- Ручное перемещение;
- Позиции записи;
- Контроль API;
- Автоматический выбор и размещение;
- Автоматическая сортировка;
- Планирование перемещений и рабочих циклов.
Formula-AllCode-Robot-Arm-Production-Cell-Description-Rus.pdf
Formula-AllCode-Robot-Arm-Production-Cell-Description-Ing.pdf